I recently completed my PhD at UC Berkeley in the Berkeley Artificial Research (BAIR) Lab and am now at OpenAI. In my research, I explored machine learning for robotics, advised by Sergey Levine. I also did undergrad at Berkeley, working with Pieter Abbeel and Sergey Levine on similar topics.
I am generally interested in how to develop intelligent behavior through interaction, especially through offline reinforcement learning and self-supervised reinforcement learning. If you want to chat, shoot me an email at anair17berkeley.edu. Some of my projects are listed below.

![]()
all

 Code for context-conditioned RIG released (available on project website)!
Code for context-conditioned RIG released (available on project website)!
Jan 2020
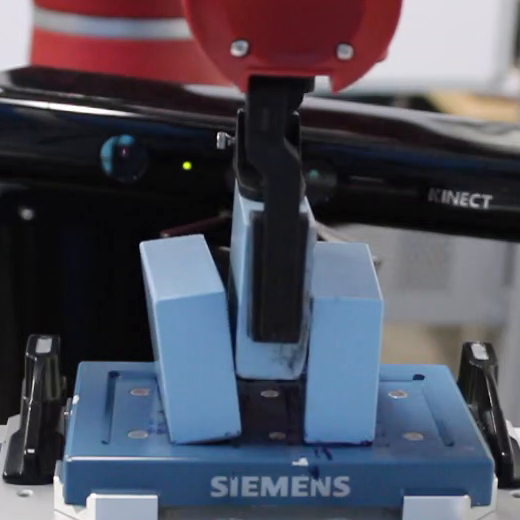
 A couple of preprints of recent work on self-supervised exploration and industrial part insertion released now on arXiv and presented at ICML workshops.
A couple of preprints of recent work on self-supervised exploration and industrial part insertion released now on arXiv and presented at ICML workshops.
Jul 2019
 Our work on visual RL with imagined goals (RIG) is released now on arXiv and was presented at ICML workshops on goal specification and lifelong learning!
Our work on visual RL with imagined goals (RIG) is released now on arXiv and was presented at ICML workshops on goal specification and lifelong learning!
Jul 2018
 I presented recent work on combining demonstrations and RL at the Deep RL symposium and robot learning workshop at NIPS 2017.
I presented recent work on combining demonstrations and RL at the Deep RL symposium and robot learning workshop at NIPS 2017.
Dec 2017
 Released our ICRA 2017 paper on arXiv along with data for the Baxter projects! Links to the data can be found on the project websites.
Released our ICRA 2017 paper on arXiv along with data for the Baxter projects! Links to the data can be found on the project websites.
Mar 2017
"Vision-Based Rope Manipulation" accepted to ICRA 2017.
Jan 2017
Finalist for the Computing Research Association (CRA) Outstanding Undergraduate Researcher Award!
Dec 2016
Our work was featured in a MIT Technology Review article: "AI Begins to Understand the 3-D World".
Dec 2016
I presented our rope manipulation work at the "Intuitive Physics" workshop at NIPS 2016.
Dec 2016
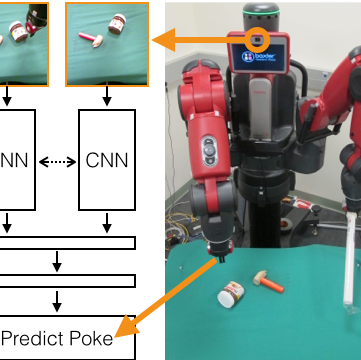
 "Learning to Poke by Poking" accepted as Oral Presentation to NIPS 2016!
"Learning to Poke by Poking" accepted as Oral Presentation to NIPS 2016!
Aug 2016
 Robots!
Robots!robotics / vision / python / ros
Aug 2015
 Wanderlust: Starting Out with Computer Vision
Wanderlust: Starting Out with Computer Visionvision / web-dev / python / opencv / hack / flask / android / scrapy / mongodb
Dec 2014
Scrape All The Thingspython / scrapy
Dec 2014
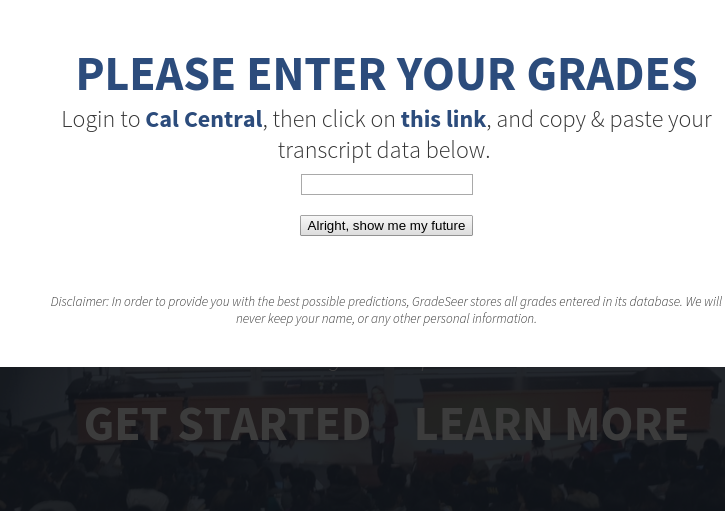 GradeSeer: Student Grade Prediction
GradeSeer: Student Grade Predictionweb-dev / machine-learning / rails / angularjs / mongodb / python
Nov 2014
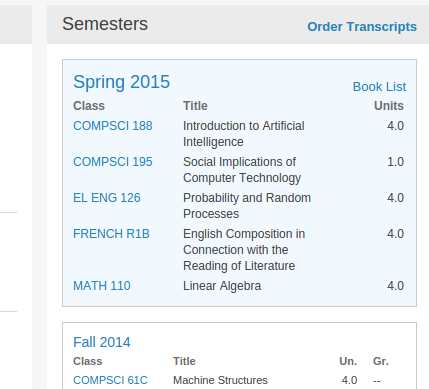 CalCentral Student Developing
CalCentral Student Developingweb-dev / rails / angularjs / maps
Nov 2014
Intro to Machine Learningmachine-learning / python / neural-nets
Nov 2014
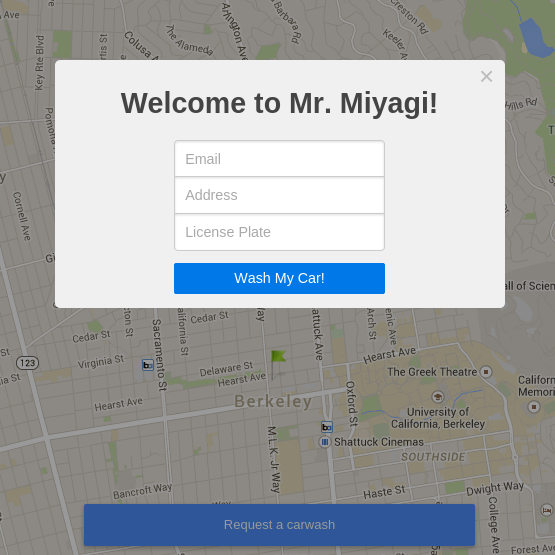 Mr Miyagi: On-demand Carwashes
Mr Miyagi: On-demand Carwasheshack / maps / rails / angularjs
Nov 2014
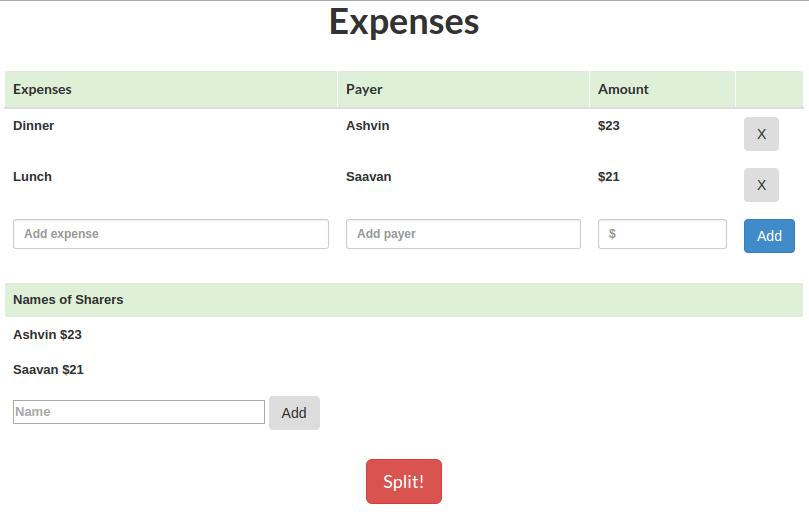 SplitWithMe: Payments App in Vegas
SplitWithMe: Payments App in Vegasweb-dev / hack / rails / angularjs / venmo
Nov 2014
 JamWithMe: In-Browser Music Collaboration
JamWithMe: In-Browser Music Collaborationweb-dev / hack / rails / js / firebase
Jan 2014
projects
Robots!robotics / vision / python / ros
Aug 2015
Wanderlust: Starting Out with Computer Visionvision / web-dev / python / opencv / hack / flask / android / scrapy / mongodb
Dec 2014
Scrape All The Thingspython / scrapy
Dec 2014
GradeSeer: Student Grade Predictionweb-dev / machine-learning / rails / angularjs / mongodb / python
Nov 2014
CalCentral Student Developingweb-dev / rails / angularjs / maps
Nov 2014
Intro to Machine Learningmachine-learning / python / neural-nets
Nov 2014
Mr Miyagi: On-demand Carwasheshack / maps / rails / angularjs
Nov 2014
SplitWithMe: Payments App in Vegasweb-dev / hack / rails / angularjs / venmo
Nov 2014
JamWithMe: In-Browser Music Collaborationweb-dev / hack / rails / js / firebase
Jan 2014
research
news
Code for context-conditioned RIG released (available on project website)!
Jan 2020
A couple of preprints of recent work on self-supervised exploration and industrial part insertion released now on arXiv and presented at ICML workshops.
Jul 2019
Our work on visual RL with imagined goals (RIG) is released now on arXiv and was presented at ICML workshops on goal specification and lifelong learning!
Jul 2018
I presented recent work on combining demonstrations and RL at the Deep RL symposium and robot learning workshop at NIPS 2017.
Dec 2017
Released our ICRA 2017 paper on arXiv along with data for the Baxter projects! Links to the data can be found on the project websites.
Mar 2017
"Vision-Based Rope Manipulation" accepted to ICRA 2017.
Jan 2017
Finalist for the Computing Research Association (CRA) Outstanding Undergraduate Researcher Award!
Dec 2016
Our work was featured in a MIT Technology Review article: "AI Begins to Understand the 3-D World".
Dec 2016
I presented our rope manipulation work at the "Intuitive Physics" workshop at NIPS 2016.
Dec 2016
"Learning to Poke by Poking" accepted as Oral Presentation to NIPS 2016!
Aug 2016